Wenbin Wan
wwan@unm.edu
Assistant Professor
Department of Mechanical Engineering
University of New Mexico
Interests: Controls \(\cup\) Machine Learning \(\cap\) CPS
|
|
|
|
|
Publications
LoRA-RC: Reservoir Computing with Low-Rank Adaptation
Wenbin Wan.
Under review, 2026.
Lightweight Physics-Informed Reservoir Computing for Battery Health Prediction
Kumar Anurag, Yanwen Xu, and Wenbin Wan.
Under review, 2026.
Learning Hidden Control Laws for GPS Spoofing via Unknown-Input Estimation and Reservoir Computing
Seif O Elsabagh, and Wenbin Wan.
LSU Symposium on Control, Learning, and Intelligent Systems, 2026.
Intelligent Connected Vehicles
Shih-lin Lin, and Wenbin Wan.
Vehicles, 2026.
GPS‐Denied LiDAR‐Based SLAM—A Survey
Haolong Jiang, Yikun Cheng, Weichen Dai, Wenbin Wan, Qinyao Liu, and Fanxin Wang
IET Cyber‐Systems and Robotics, 2025.
RCUKF: Data-Driven Modeling Meets Bayesian Estimation
Kumar Anurag, Kasra Azizi, Francesco Sorrentino, and Wenbin Wan.
IFAC Modeling, Estimation and Control Conference (MECC), 2025.
DBaS-Log-MPPI: Efficient and Safe Trajectory Optimization via Barrier States
Fanxin Wang, Haolong Jiang, Chuyuan Tao, Wenbin Wan and Yikun Cheng
IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS), 2025.
Towards Resilient Tracking in Autonomous Vehicles: A Distributionally Robust Input and State Estimation Approach
Kasra Azizi, Kumar Anurag, and Wenbin Wan.
IFAC Intelligent Autonomous Vehicles (IAV), 2025.
Resilient Estimator-based Control Barrier Functions for Dynamical Systems with Disturbances and Noise
Chuyuan Tao, Wenbin Wan, Junjie Gao, Bihao Mo, Hunmin Kim, Naira Hovakimyan
AIAA AVIATION, 2024.
@inproceedings{tao2024resilient,
title={Resilient Estimator-based Control Barrier Functions for Dynamical Systems with Disturbances and Noise},
author={Tao, Chuyuan and Wan, Wenbin and Gao, Junjie and Mo, Bihao and Kim, Hunmin and Hovakimyan, Naira},
booktitle={AIAA AVIATION FORUM AND ASCEND 2024},
pages={4498},
year={2024}
}
Backup Plan Constrained Model Predictive Control with Guaranteed Stability
Ran Tao, Hunmin Kim, Hyung-Jin Yoon, Wenbin Wan, Naira Hovakimyan, Lui Sha and Petros Voulgaris.
Journal of Guidance, Control, and Dynamics, 2024.
@article{tao2024backup,
title={Backup Plan Constrained Model Predictive Control with Guaranteed Stability},
author={Tao, Ran and Kim, Hunmin and Yoon, Hyung-Jin and Wan, Wenbin and Hovakimyan, Naira and Sha, Lui and Voulgaris, Petros},
journal={Journal of Guidance, Control, and Dynamics},
volume={47},
number={2},
pages={233--246},
year={2024}
}
Resilient Estimation and Safe Planning for UAVs in GPS-Denied Environments
Wenbin Wan, Hunmin Kim, Naira Hovakimyan, Petros Voulgaris, and Lui Sha.
Control of Autonomous Aerial Vehicles, Springer, 2023.
@Inbook{wan2024safeGPS,
title="Resilient Estimation and Safe Planning for {UAV}s in {GPS}-Denied Environments",
bookTitle="Control of Autonomous Aerial Vehicles: Advances in Autopilot Design for Civilian {UAV}s",
author={Wan, Wenbin and Kim, Hunmin and Hovakimyan, Naira and Voulgaris, Petros and Sha, Lui},
journal={Control of Autonomous Aerial Vehicles},
publisher={Springer},
year={2023}
}
Robust Vehicle Lane Keeping Control with Networked Proactive Adaptation
Hunmin Kim, Hyungjin Yoon, Wenbin Wan, Naira Hovakimyan, Lui Sha, and Petros Voulgaris.
Artificial Intelligence, 2023.
Certified Robust Control under Adversarial Perturbations
Jinghan Yang, Hunmin Kim, Wenbin Wan, Naira Hovakimyan, and Yevgeniy Vorobeychik
IEEE American Control Conference (ACC), 2023.
Preprint: [arXiv]
Towards Trustworthy Autonomy: Reliable and Efficient Interval Estimation and Learning for Robust Model Predictive Control
Wenbin Wan, Hunmin Kim, and Naira Hovakimyan.
AAAI Conference on Artificial Intelligence Workshop on Trustworthy Autonomous Systems Engineering, 2022.
BibTex:
@article{wan2022interval,
title={Towards Trustworthy Autonomy: Reliable and Efficient Interval Estimation and Learning for Robust Model Predictive Control},
author={Wan, Wenbin and Kim, Hunmin and Hovakimyan, Naira},
journal={The 36th AAAI Conference on Artificial Intelligence Workshop on Trustworthy Autonomous Systems Engineering},
year={2022}
}
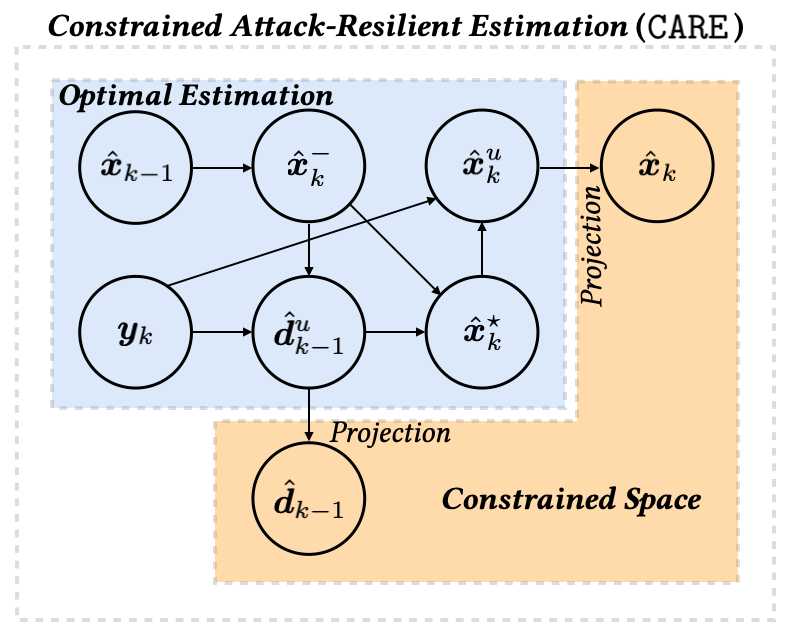
Constrained Attack-Resilient Estimation of Stochastic Cyber-Physical Systems.
Wenbin Wan, Hunmin Kim, Naira Hovakimyan, and Petros Voulgaris.
arXiv preprint arXiv:2109.12255, 2021.
[arXiv]
BibTex:
Backup Plan Constrained Model Predictive Control
Hunmin Kim, Hyungjin Yoon, Wenbin Wan, Naira Hovakimyan, Lui Sha, and Petros Voulgaris.
IEEE Conference on Decision and Control (CDC), 2021.
BibTex:
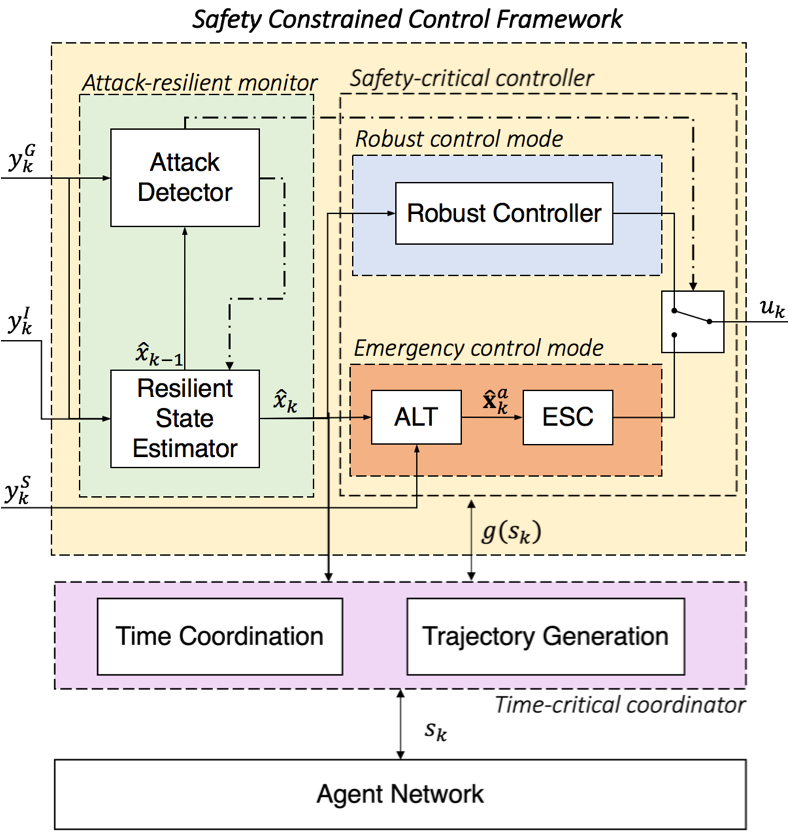
Safety Constrained Multi-UAV Time Coordination: A Bi-level Control Framework in GPS Denied Environment
Wenbin Wan, Hunmin Kim, Yikun Cheng, Naira Hovakimyan, Petros Voulgaris, and Lui Sha.
AIAA AVIATION 2021.
BibTex:
@inproceedings{wan2021safety,
title={Safety Constrained Multi-{UAV} Time Coordination: A Bi-level Control Framework in {GPS} Denied Environment},
author={Wan, Wenbin and Kim, Hunmin and Cheng, Yikun and Hovakimyan, Naira and Voulgaris, Petros and Sha, Lui},
booktitle={AIAA AVIATION 2021},
pages={2463},
year={2021}
}
Robust Vehicle Lane Keeping Control with Networked Proactive Adaptation
Hunmin Kim, Wenbin Wan, Naira Hovakimyan, Lui Sha, and Petros Voulgaris.
IEEE American Control Conference (ACC), 2021.
BibTex:
A Safety Constrained Control Framework for UAVs in GPS Denied Environment
Wenbin Wan, Hunmin Kim, Naira Hovakimyan, Lui Sha, and Petros Voulgaris
IEEE Conference on Decision and Control (CDC), 2020.
BibTex:
@inproceedings{wan2020safety,
title={A safety constrained control framework for {UAV}s in {GPS} denied environment},
author={Wan, Wenbin and Kim, Hunmin and Hovakimyan, Naira and Sha, Lui and Voulgaris, Petros G},
booktitle={IEEE Conference on Decision and Control (CDC)},
pages={214--219},
year={2020}
}
Attack-resilient Estimation for Linear Discrete-time Stochastic Systems with Input and State Constraints
Wenbin Wan, Hunmin Kim, Naira Hovakimyan, and Petros Voulgaris.
IEEE Conference on Decision and Control (CDC), 2019.
BibTex:
@inproceedings{wan2019attack,
title={Attack-resilient estimation for linear discrete-time stochastic systems with input and state constraints},
author={Wan, Wenbin and Kim, Hunmin and Hovakimyan, Naira and Voulgaris, Petros G},
booktitle={IEEE Conference on Decision and Control (CDC)},
pages={5107--5112},
year={2019}
}
Towards Resilient UAV: Escape Time in GPS Denied Environment with Sensor Drift
Hyungjin Yoon, Wenbin Wan, Hunmin Kim, Naira Hovakimyan, Lui Sha, and Petros Voulgaris.
IFAC Symposium on Automatic Control in Aerospace (ACA), 2019.
BibTex:
@article{esc2019,
title={Towards resilient {UAV}: Escape time in {GPS} denied environment with sensor drift},
author={Yoon, Hyungjin and Wan, Wenbin and Kim, Hunmin and Hovakimyan, Naira and Sha, Lui and Voulgaris, Petros G},
journal={IFAC-PapersOnLine},
volume={52},
number={12},
pages={423--428},
year={2019},
publisher={Elsevier}
}